Новости
Последние поступления
Галерея
Мероприятия
Видео
Контакты
(499) 941-01-15
#Биология
Биологи МГУ опровергли постоянство белкового состава рибосом
08 октября 2025, 14:11
#Другое
Белок японского угря визуализировали в МГУ
23 сентября 2025, 18:03
#Физика
Физики подтвердили теорему Хокинга о площади горизонта событий черной дыры
15 сентября 2025, 12:49
#Медицина
Ученые НОШ МГУ выяснили причины женского бесплодия
15 сентября 2025, 12:46
#Биология
В честь МГУ назван новый вид голожаберного моллюска
15 сентября 2025, 12:28
#Биология
Ученые выяснили, как перистые крылья микрожуков помогают им отлично летать
28 августа 2025, 15:57
Последние поступления
#Другое
В Новосибирском государственном университете разработали автономный голосовой интерфейс для «умного дома»
10 ноября 2025, 13:26
#Медицина
Разработка ученых НГУ позволит ускорить поиск наиболее эффективных лекарств от рака
28 октября 2025, 20:39
#Медицина
Содержащее минеральные нанотрубки покрытие повысит срок службы биоразлагаемых имплантатов
28 октября 2025, 20:34
#Биология
Ученые создали новый тип клеточного биосенсора пероксида водорода с возможностью выбора цвета флуоресценции
28 октября 2025, 20:18
#Биология
Два новых штамма зеленых микроводорослей найдут применение в производстве современных пищевых продуктов, кормов и экологических материалов
08 октября 2025, 14:09
#Другое
Ученые накормили рачков микропластиком и посмотрели, что будет
23 сентября 2025, 18:05
#Другое
Российские ученые нашли способ, как тушить возгорания нефтепродуктов в 1,5 раза быстрее
23 сентября 2025, 18:01
#Языки и тексты
Выпускница НГУ изучила разговорную речь жителей Академгородка
15 сентября 2025, 12:55
#Медицина
Ученые НОШ МГУ выяснили причины женского бесплодия
15 сентября 2025, 12:46
#Медицина
Ученые ТПУ синтезировали новые вещества, которые обладают противораковыми свойствами
15 сентября 2025, 12:37
#Другое
Магистрант НГУ запустила стартап по производству важного фермента для сыроварения
15 сентября 2025, 12:34
#Медицина
Ученые создали многофункциональные наночастицы для диагностики и уничтожения опухолей под действием света
15 сентября 2025, 12:25
#Физика
Уральские ученые в 3,7 раза увеличили стабильность магнитов
08 сентября 2025, 16:21
#Биология
«Теплолюбивые» деревья соседствовали с таежными в конце последнего ледникового периода
08 сентября 2025, 16:18
#Другое
Математическая модель памяти показала оптимальное «количество органов чувств»
08 сентября 2025, 16:13
Москва
07.09
22:49
II Международная научно-практическая конференция «Искусственный интеллект и духовная культура»
#Другое
07 сентября 2025, 22:49
#Химия
Сверхкритический флюид поможет «настраивать» пространственную структуру противоопухолевых препаратов
06 сентября 2025, 23:41
#
В ЛЭТИ разработали прототип портативного стенда для проверки оптических устройств, определяющих лазерную локацию орбитальных аппаратов
06 сентября 2025, 23:38
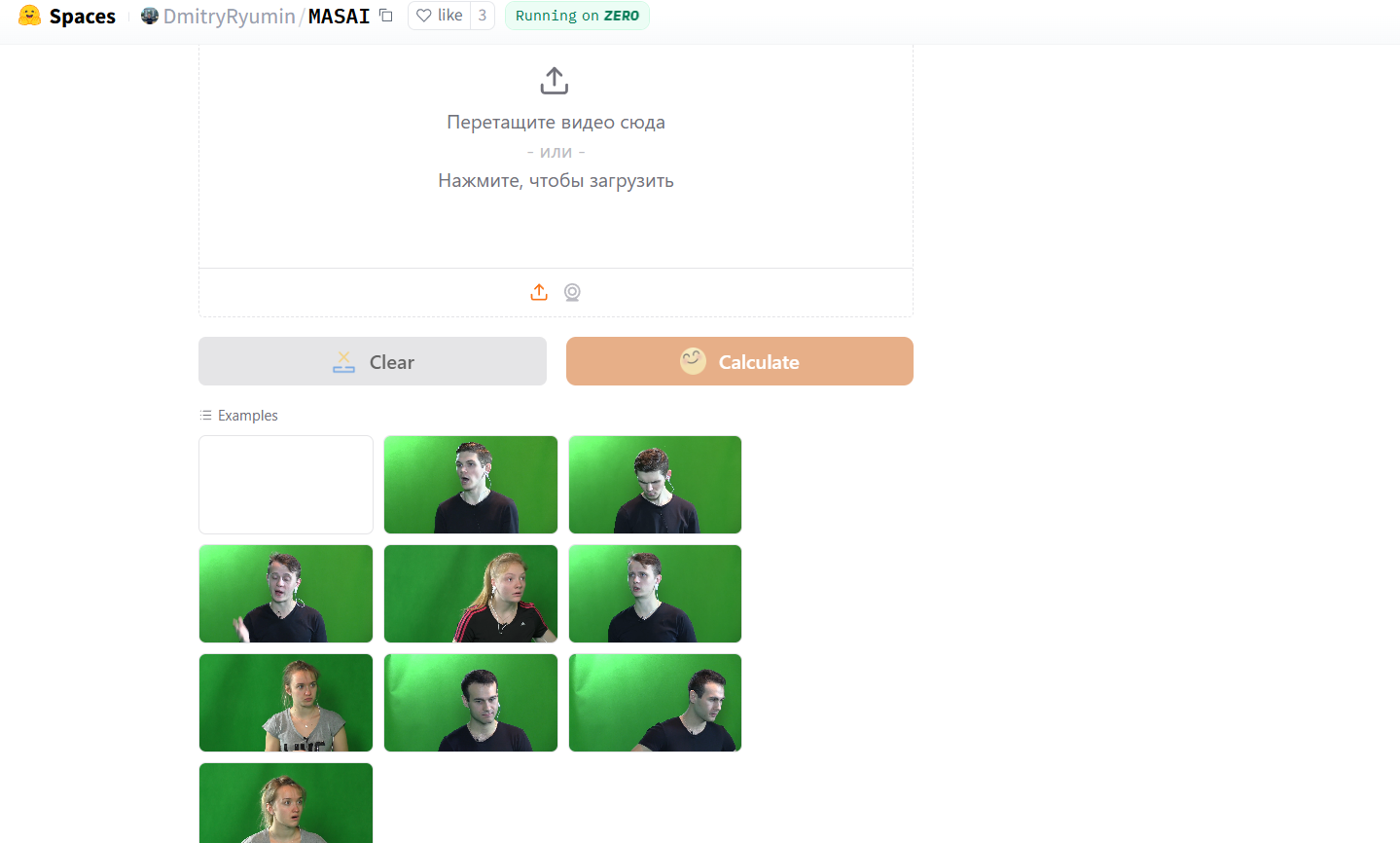
#Культура
В СПб ФИЦ РАН разработали систему распознавания эмоций человека по видео и речи
01 сентября 2025, 23:13
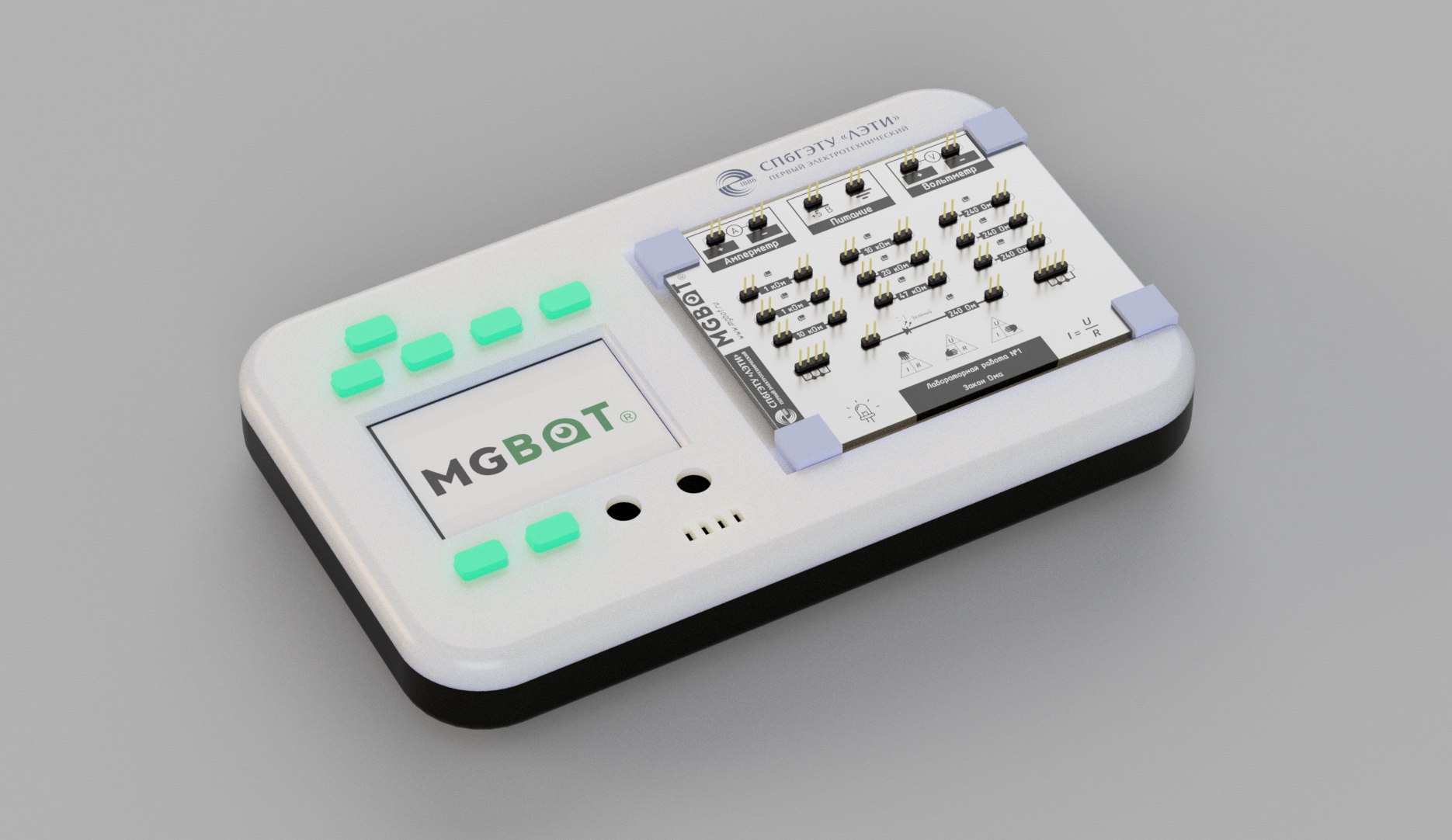
#Другое
В ЛЭТИ создали стенд для изучения основ электроники для школьников и студентов
28 августа 2025, 16:07